

تیمی از پژوهشگران دانشگاه تگزاس در دالاس با همراهی محسن جعفرزاده دانشجوی دکترای برق این دانشگاه موفق به کنترل ماهیچههای مصنوعی ساخته شده از پلیمر پوشش داده شده با نقره شدند.
به نقل از "ساینس دایرکت"؛ عبارت «ماهیچه مصنوعی» به ترکیباتی اطلاق میشود که هنگام اتصال به منبع انرژی، منقبض یا منبسط میشوند. تاکنون ماهیچههای مصنوعی متنوعی ابداع شدهاند. یکی از نواع رایج ماهیچههای مصنوعی، آلیاژهای حافظهدار مانند ترکیب تیتانیوم و نیکل است. اما این آلیاژها دارای پسماند گسترده ای هستند. ماهیچههای مصنوعی قویتر از الیاف کربن تو خالی کشیده شده(نانو لولههای تک ستونی) ساخته میشوند که هزینه تولید بالایی دارند که آنها را غیراقتصادی میکنند.
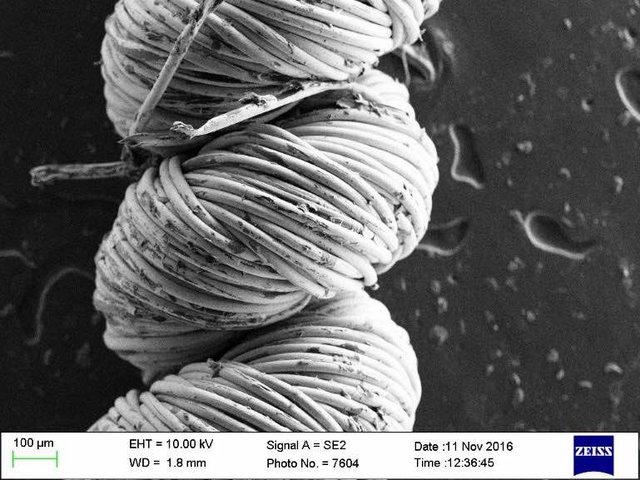
محققان در دانشگاه تگزاس در دالاس، گزارش دادهاند که موفق به کنترل ماهیچه مصنوعی ارزان قیمت ساخته شده از پلیمر پوشش داده شده با نقره، شدند. ماهیچه پلیمری پیچیده شده با اتصال به منبع الکتریکی منقبض میشوند. جهت ساخت یک ماهیچه پلیمری پیچیده شده، ابتدا یک نخ پلیمری پوشش داده شده با نقره را میتابانند تا شکل مارپیچ(فنر مکانیکی) شود. سپس آن را در دمای بالا(نزدیک به نقطه ذوب) حرارت میدهند تا بازپخت(آنیل) شود.
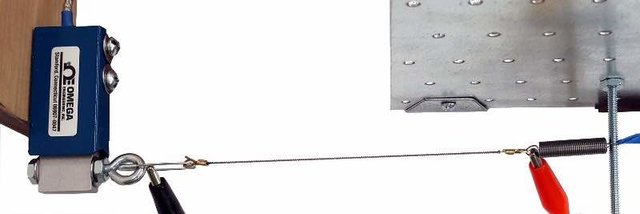
لازم به ذکر است که ماهیچه پلیمری پیچیده شده همواره باید در حالت کششی مورد استفاده قرار گیرد. هنگامی که این ماهیچه به منبع الکتریکی متصل میشود جریان برق از آن عبور کرده و به دلیل مقاومت الکتریکی(نقره) تولید گرما میکند. با بالا رفتن دما، پلیمر منقبض میشود و باعث انقباض ماهیچه میشود.
محسن جعفرزاده دانشجوی دکترای برق دانشگاه تگزاس در دالاس به همراه همکارانش به مدت دو سال بر کنترل ماهیچههای مصنوعی گوناگون پژوهش کردهاند. در یکی از پژوهشها، آنها به مطالعه رفتار پویای ماهیچه پلیمری پیچیده شده هنگامی که ورودی ولتاژ است پرداختهاند.
این پژوهش نشان داد که میتوان ماهیچه پلیمری پیچیده شده را با فضای حالت مرتبه اول مدلسازی نمود. ماهیچههای پلیمری پیچیده شده در مقایسه با ماهیچههای طبیعی بسیار کند هستند. بنابراین افزایش قابل ملاحظه سرعت این ماهیچههای مصنوعی، دستاورد چشمگیری در زمینه عملیاتی سازی آنها حساب میشود.
در آخرین تحقیقات آنها، که در نشریه علمی مکاترونیک به چاپ رسیده است، از قواعد زبانی جهت طراحی سامانه استنتاج فازی برای سرعت بخشیدن به کنترل ماهیچههای پلیمری پیچیده شده استفاده کرده اند. کنترلگر طراحی شده توسط آنها، دیجیتال و زمان گسسته بوده و میتوان آن را به راحتی در اکثر پردازندههای دیجیتال ارزان قیمت موجود در بازار پیاده سازی نمود. راهکار آنها به درستی به چالش های موجود در استفاده از ماهیچههای پلیمری پیچیده شده، از جمله سرعت، دقت، مقاومت و قیمت، پاسخ میدهد. بنابر گفته این پژوهشگران، از این کنترلگر میتوان در تولید دست مصنوعی، تجهیزات پزشکی، رباتها و اسکلتهای پوشیدنی استفاده نمود.


.: Weblog Themes By Pichak :.
