
امروزه، با گسترش روزافزون فناوری، مردم کاملا به ضرورت حس لامسه و نقش فناوری هپتیک بهعنوان بخشی از تعاملات هرروزه با گوشیها و سایر دستگاههای هوشمند خود پی بردهاند. حس لامسه بخش مهمی از تعامل هرروزهی افراد با محیط را شکل میدهد و این ورودیهای کوچک میتوانند اطلاعات زیادی را منتقل کنند. با این حال، افرادی که موفق به تجربهی حس لامسه با فناوری هپتیک در ابزارهای واقعیت مجازی شدند، میتوانند کلیدی بودن این حس را در ایجاد تعامل و هرچه واقعیتر بودن این حس تأیید کنند.
هپتیک چیست؟
هپتیک (Haptic) از كلمهی يونانی Haptesthai بهمعنی لمسكردن گرفته شده است. دانشمندان چندين دهه است كه روی هپتیک تحقيق كرده و به نكاتی در رابطه با بيولوژی لامسه دست يافتهاند. برای نمونه، آنها میدانند كه چه نوع گيرندههایی در پوست بدن وجود دارد و چگونه اعصاب، اطلاعات را بين سيستم اعصاب مركزی و نقطهی تماس منتقل میكند. هپتیک بهعنوان يک رشتهی تحقيقاتی، همراستا با تكامل اتوماسيون پيش رفته است. قبل از تحول صنعتی، تحقيقات دانشمندان روی موجودات زنده برای کشف چگونگی نحوهی لمسكردن آنها متمركز بوده است. زيستشناسان متوجه شدند كه حتی موجودات زندهی سادهای چون ستارهی دريایی و كرمها نیز پاسخهای پيچيدهی لمسی از خود بروز میدهند. در اوايل قرن بيستم، روانشناسان و پژوهشگران پزشكی روی تجربهی لامسهی انسانها تحقيقات گستردهای انجام دادند. آنها دریافتند که پوست دست مجهز به گيرندهها، اعصاب و بخشهای سيستم عصبی است كه حس لامسه را به مغز و نخاع شوكی متصل میسازد.
ظهور هپتیک در دنیای فناوری
پس از توسعهی ماشينها و رباتها، نیاز به وجود حس مذکور در اين وسايل مكانيكی نيز احساس شد؛ بنابراين، پژوهشگران تلاش کردند تا راهی برای دریافت و درک این حس برای ماشینها پیدا کنند. در دههی ۱۹۴۰ ميلادی، سيستمهای كنترل از راه دوری كه در آنها از فناوری هپتیک استفاده شده بود، برای جابهجايی مواد اتمی و خطرناک به كار گرفته شدند. در اين سيستمها كارگران از طريق رابط یک ماشين موفق به جابهجایی مواد خطرناک و سمی بدون وجود هيچگونه خطر و ریسکی شدند. سرانجام دانشمندان موفق به ساخت طرحهایی شدند كه در آنها موتورها و سيگنالهای الكترونيكی جايگزين اتصالات مكانيكی شدهاند. پيشرفت بزرگ ديگر در قالب كامپيوترها وارد اين عرصه شد. در ابتدا كامپيوترها برای كنترل ماشينها در يک محيط واقعی مورد استفاده قرار میگرفتند؛ مانند كامپيوتری كه رباتی را در خط مونتاژ يک كارخانهی خودروسازی كنترل میكرد؛ اما در دههی ۱۹۸۰ ميلادی، كامپيوترها توانایی توليد محيطهای مجازی را پيدا كردند. در سال ۱۹۹۳ در آزمایشگاه هوش مصنوعی دانشگاه MIT دستگاهی ساخته شد كه لامسه را شبيهسازی میكرد و در نهايت اين امكان را فراهم ساخت تا بتوان چيزی را كه به وسيلهی كامپيوتر به وجود آمده، لمس و حس كرد.
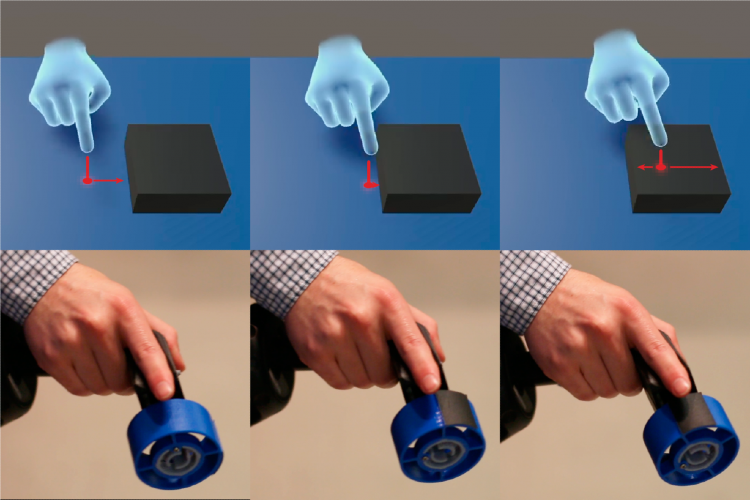
با وجود این، دانشمندان علم كامپيوتر مشكل بزرگی در انتقال دريافت و تجربهی ابتدایی از حس لامسه به سيستمهای واقعيت مجازی دارند. قابليت تبديل اشارات بصری و شنوایی به مدلهای كامپيوتری آسان است ولی دربارهی حس لامسه اوضاع به این سادگی نیست. صفحهكليدها به كاربران اجازه میدهند تا تايپ كنند و جوی استيکها نيز میتوانند لرزش و ويبره داشته باشند، اما چگونه يک كاربر میتواند آنچه در دنيای مجازی وجود دارد را لمس كند؟ چگونه كسی كه در حال انجام بازی ويديویی است، میتواند سختی و سرمای قسمت فلزی اسلحهی شخصيت مجازی بازی را حس كند؟ چگونه يک فضانورد كه در يک شبيهساز كامپيوتری در حال آمادهشدن برای سفر به فضا است، میتواند وزن يا ناهمواریهای يک سنگ فضایی شبيهسازیشده را احساس كند؟ از دهه ۱۹۸۰ ميلادی، دانشمندان علوم كامپيوتر در تلاش برای پاسخگویی به اين سؤالات هستند که باعث شکلگیری علم هپتیک علوم رایانه شده است.
مقالههای مرتبط:
در بازیهای ويديویی، وجود قابليتهای لمسی بسيار جالب و جذاب است، چرا كه واقعی جلوهدادن بازی و در نتيجه لذت كاربر را افزايش میدهد. همچنین، رابطهای لامسه در آموزش و ديگر كاربردها حياتی هستند؛ چرا كه حس لامسه، اطلاعات غنی و جزئيات زیادی را دربارهی يک شیء انتقال میدهد. وقتی كه حس لامسه با ديگر حسها، بهخصوص بينایی تركيب میشود، ميزان اطلاعاتی را كه برای پردازش به مغز فرستاده میشود، افزايش میدهد. افزايش اطلاعات دريافتی خطای كاربر و ميزان مصرف انرژی را کاهش میدهد.
پوست مصنوعی
پژوهشگران انستیتوی فدرال فناوری سوئیس لوزان (EPFL) گام بزرگی در فناوری هپتیک برداشتند و موفق به ساخت پوست انعطافپذیر مصنوعی شدند. این پوست مصنوعی با داشتن قابلیت فیدبک هپتیک میتواند در هر حوزهای از واقعیت مجازی تا توانبخشی پزشکی مورد استفاده قرار گیرد. این پوست از سیلیکون و الکترود ساخته شده است و میتواند دور انگشت یا مچ دست پیچیده شود و با فشار یا لرزش، بازخورد لازم را به کاربر منتقل کند.
در بافت این پوست مصنوعی سنسورهایی تعبیه شده است که میتواند هرگونه تغییرشکلی را تشخیص دهد، بهگونهای که فیدبک متناسب با پاسخ به حرکات قابل تنظیم است. چنین ویژگیای باعث میشود که سیستم کاربردیتر شود و فیدبک واقعگرایانهتری داشته باشد.
هرشال سونار، پژوهشگر EPFL و نویسندهی اصلی این پژوهش گفت:
این اولین باری است که موفق به ایجاد یک پوست مصنوعی کاملا نرم شدیم که در آن سنسورها و محرکها باهم بهصورت یکپارچه قرار دارند. این به ما امکان کنترل حلقه بسته را میدهد، به این معنی که میتوانیم تحریک لرزشی که توسط کاربر احساس میشود را با دقت و اطمینان تنظیم کنیم. این فناوری برای اپلیکیشنها و گجتهای پوشیدنی ازجمله آزمایشهای پزشکی بیمار در اپلیکیشنهای پزشکی و سلامت ایدهآل است.
این پوست مصنوعی علاوه بر انعطافپذیری دارای قابلیت کششی نیز است و تا چهار برابر طول اصلیاش میتواند کشیده شود. این بدان معنا است که میتواند در برابر سختیهای حرکات روزانه مقاومت کند؛ بنابراین، میتواند به ابزاری برای بیمارانی که حس لامسهی خود را از دست دادهاند، تبدیل شود. همچنین، با استفاده از چنین اختراعی میتوان حس لامسهی همهجانبهای را در فناوری واقعیت مجازی تجربه کرد.
سونار اضافه کرد:
گام بعدی، تهیهی نمونهی اولیه کاملا پوشیدنی برای کاربردهای توانبخشی، واقعیت مجازی و واقعیت افزوده خواهد بود. همچنین، این نمونهی اولیه در مطالعات علوم اعصاب مورد آزمایش قرار خواهد گرفت که میتواند برای شبیهسازی بدن انسان استفاده شود. افزون بر این، پژوهشگران فعالیت پویای مغز را در آزمایشهای رزونانس مغناطیسی بررسی خواهند کرد.
.: Weblog Themes By Pichak :.
